
|
| Steuerung |
| All Pictures © P.Knappert |
| Alle Bilder dieser WebSite © P.Knappert |
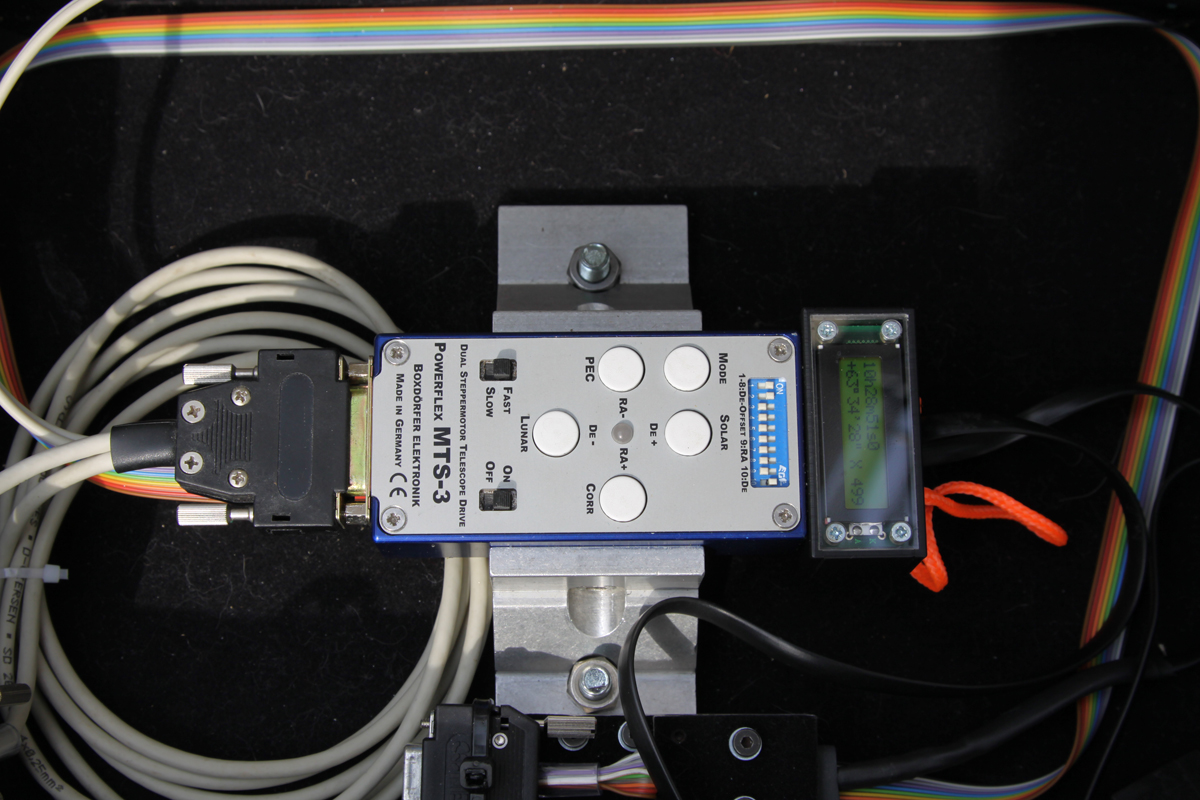 Da Das obige Bild zeigt die Mikroschrittsteurerung, die ich für die Ansteuerung des Rektaszension- und Deklinationsantriebs einsetze Es handelt sich dabei um eine Boxdörfer MTS3-SDI, die 1/64 Mikroschritt erlaubt. Angebaut ist ein Display, das einmal für die Parametrisierung der Motorenparameter Verwendung findet und zum anderen den GOTO-Betrieb der Steuerung ermöglicht. Die angeschlossenen ESCAP-Motoren erlauben eine 2000 fache GOTO Geschwindigkeit. 2000 fach heisst 2000 mal so schnell wie die Nachführgeschwindigkeit in RA. Generell wird die Steurung von außen über die RS232-Schnittstelle und LX200 Kommandos angesprochen. Eingesetzt wird Carte Du Ciel um das Teleskop auf jeden Punkt des Himmel genau positionieren zu können und als Guiding-Software Guidemaster 2.25 beta. Die Steuerung ist in ein Aluminium-Flightcase fest eingebaut und hat die Anschlüsse nach außen geführt. Das erleichtert den Field-Einsatz ungemein. Ein kleines Handpanel erlaubt zusätzlich noch ganz feine Verfahrgeschwindigkeiten der Achsen im manuellen Betrieb. Die ganze Steuerung ist inclusive Kabel Feldtauglich aufgebaut (!) 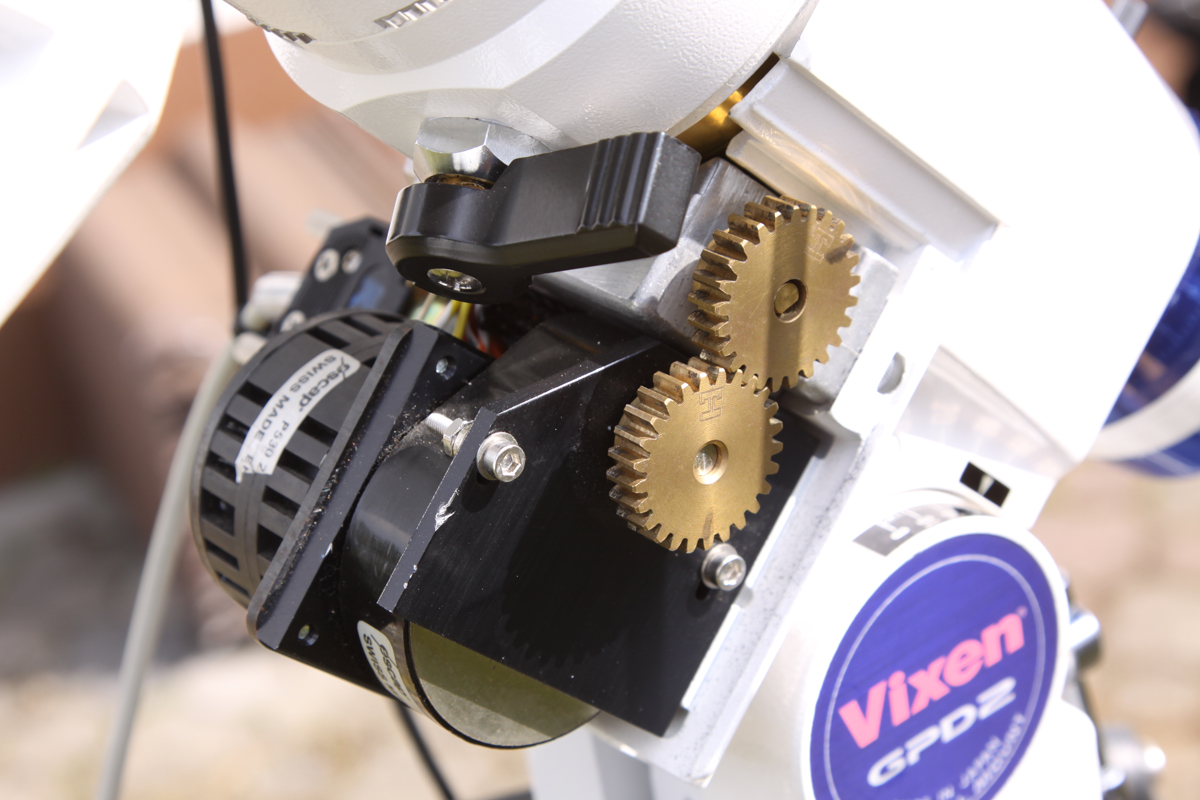 Das obige Bild zeigt den RA-Motor. Es handelt sich um einen ESCAP-Präzisionmotor Swiss made. Der Schrittmotor hat pro Umdrehung 100 Schritte. Jeder dieser Schritte wird jetzt in 1/64 Teilschritte unterteilt, was dann pro Umdrehung des Motors 6400 Schritte sind. Normaleweise suche ich alle Himmelsobjekte manuell auf, aber für ganz schwache Deep-Sky Objekte hat sich das GOTO als sehr nützlich erwiesen. Die maximale GOTO Geschwindigkeit beträgt etwa 2.5° pro Sekunde und die Positioniergenauigkeit beträgt dann +/- 1 Bogenminuten bei Verfahrwegen von etwa 120° Hier nochmal für die mathematisch bewanderten Leser die Berechnung der Genauigkeit der Motoren bezogen auf einen Mikroschritt. Eine parallaktische Montierung benötigt für eine ganze 360° Umdrehung um die Polachse in einen siderischen Tag und das sind dann 86164 Sekunden. Die Schneckenzahn-Anzahl beträgt bei der GPD2 144 Zähne, die ESCAP-Getriebe haben 1:12. Die Schrittmotoren machen 100 Schritte pro Umdrehung Daraus folgt: Eine Umdrehung der Polachse sind: 360° x 60' x 60'' = 1.296.000 '' Anzahl Zähne beträgt 144, daraus folgt: 1.296.000 " / 144 = 9000 '' pro Zahn, d.h. wenn die RA-Welle eine Umdrehung macht, bewegt sich das Teleskop um 9000'' , also genau um 2.5° weiter. Jetzt kommt das Vorschaltgetriebe mit 1:12, d.h. wenn sich der Schrittmotor einmal um 360° gedreht hat,dann bewegt sich das Teleskop um 9000'' / 12 = 750" weiter. Jetzt hat der Schrittmotor ja 100 Schritte pro Umdrehung, also folgt: 750'' / 100 = 7,5'' pro Schritt des Schrittmotors. Jeder Schritt ist nun noch in 64 Mikroschritte untersetzt, also folgt pro Mikroschritt eine Genaugikeit der Montierung von: 7.5'' / 64 = 0.11 '' Fazit: Eine Schrittauflösung von 0.11 '' reicht für das Guiding von Teleskopbrennweiten bis etwa 4.000 mm aus (!) |
 |